Physics-Informed Anchor Prediction & Atlas Visualization
Celtic Sea Floating Offshore Wind – Physics-Informed Anchor Prediction & Atlas Visualization
Executive Summary
This study establishes the predictive anchor design layer of Morie Analytics by transforming physics-based anchor verification into a lease-scale machine learning capability.
Building on the coupled outputs of morie_soil, morie_mooring and morie_anchor, the workflow replaces the iterative suction pile sizing loop with a physics-informed surrogate model trained on synthetic engineering data generated from the integrated offshore design chain.
The surrogate architecture mirrors the underlying engineering workflow, preserving the causal separation between soil reconstruction, mooring-load transfer and anchor-capacity response through a two-stage predictive cascade.
The result is a reproducible and scalable framework that predicts anchor loads and dimensions in milliseconds, enabling full-domain evaluation and system-level decision support. These Atlas layers enable rapid identification of design-driving regions, anchor standardization opportunities and spatial trends in geotechnical demand across the lease.
This module represents the transition from point-based offshore engineering verification to lease-scale predictive capability across the integrated floating wind workflow.
Site intelligence → Layout generation → Soil reconstruction → Mooring physics → Anchor verification → Anchor prediction & Atlas visualization

Figure 1 – Integrated two-stage Random Forest surrogate architecture linking morie_soil, morie_mooring and morie_anchor into lease-scale anchor prediction workflows.
Project Scope
- Physics-based dataset generation using anchor capacity models
- Load transfer and capacity solving across spatial samples
- Feature engineering from soil and load fields
- Training of a two-stage machine learning surrogate
- Validation within the cropped local engineering domain
- Lease-scale prediction and mapping
This study converts iterative anchor design into a scalable predictive framework.
Engineering Context
Anchor design in floating offshore wind is governed by:
- Layered soil resistance
- Load transfer from mooring lines
- Eccentric padeye loading
- Combined VHM interaction constraints
In morie_anchor, this is solved through an iterative process:
Find (D, L) such that UC ≈ 1
This approach is robust, but computationally expensive. At lease scale, where thousands of anchor locations must be evaluated, the process becomes prohibitive.
This workflow introduces a new approach:
Learn the physics → Replace the iteration → Scale the solution
Inputs and Data Sources
This study builds directly on upstream Morie Analytics outputs:
From morie_soil
- Layered soil profiles
- Spatial variation of soil parameters
From morie_mooring
- Mudline load fields
- Scenario-based load cases
From morie_anchor
- Load transfer from mudline-to-padeye
- Capacity model
Additional Inputs
- Spatial sampling domain
- Scenario definitions
- Model configuration parameters
All inputs are integrated into a data-driven engineering framework, this provides the training data foundation for surrogate modeling.
System Flow
Spatial Sampling → Physics Solver → Dataset Generation → Model Training → Prediction
The architecture ensures traceability from physics-based design to machine learning prediction.
Processing Workflow
- Sample spatial domain (x, y, depth)
- Query soil properties
- Query mudline loads from mooring fields
- Transfer loads to padeye (physics-based)
- Solve anchor capacity (UC ≈ 1)
- Store optimal design (D, L, Mass)
- Train surrogate model
- Deploy surrogate model
- Generate lease-scale prediction fields
- Build Atlas visualization layers
- Support engineering interpretation
This converts physics-based simulations into predictive capability.
Design Basis
This workflow is intended as a site-conditioned surrogate framework suitable for preliminary lease-scale anchor assessment.
The current implementation is trained exclusively on:
- The cropped Celtic Sea sand domain from
morie_soil - Relatively narrow water-depth variation (~88–94 m) from
morie_site - Fixed suction-pile configuration assumptions from
morie_anchor - Limited environmental loading scenarios from
morie_mooring
The surrogate is therefore intended for interpolation within the trained design space rather than for extrapolation to arbitrary offshore environments.
The workflow does not currently include:
- Multi-soil environments (clay/rock)
- Installation effects
- Cyclic degradation
- Dynamic foundation response
- Probabilistic uncertainty quantification
- Multi-anchor interaction effects
Surrogate Model Architecture
The surrogate model follows a two-stage cascade, mirroring the engineering process.
The present implementation uses a two-stage Random Forest surrogate, although the layered architecture shown conceptually is compatible with future deep-learning implementations.
Stage A — Surrogate of Load Transfer Physics
Inputs:
- Soil features (
morie_soil) - Mudline load fields (
morie_mooring) - Anchor transfer assumptions (
morie_anchor)
Outputs:
- Padeye loads
Stage B — Surrogate of Anchor Capacity Design
Inputs:
- Soil features (
morie_soil) - Padeye loads derived from Stage A
Outputs:
- Diameter (D)
- Length (L)
- Mass
Engineering Significance
This structure preserves:
- Physical causality
- Separation of mechanisms
- Interpretability of results
Rather than treating anchor design as a black-box regression problem. This decomposition also improves interpretability and error traceability.
Stage A captures the transformation of mudline loads into embedded padeye demand, while Stage B learns the resulting capacity-constrained anchor sizing behavior. The separation allows prediction errors to be associated with specific physical mechanisms rather than being absorbed into a single black-box model.
Interpretation of Stage A and Stage B
The two-stage structure mirrors the original physics-based workflow.
In the morie_anchor reference formulation:
- Mudline loads are transferred to padeye level using embedded line mechanics and soil interaction models
- Anchor capacity is obtained by solving the capacity-constrained model given anchor dimensions
In morie_atlas:
- Stage A acts as a surrogate of the mudline-to-padeye load transfer process, learning the combined effects of:
- Soil friction and strength
- Embedded chain behavior
- Load redistribution along the seabed
- Stage B acts as a surrogate of the anchor capacity optimization loop, mapping padeye loads to feasible anchor dimensions.
This decomposition preserves the physical structure of the problem while enabling scalable prediction.
The model does not replace physics — it learns its outcomes and structure.
This enables the decomposition of complex engineering workflows into scalable predictive components, while preserving physical consistency.
Dataset Generation
The dataset is generated entirely from physics-based simulations.
Mooring Load Screening for Stage A
Before surrogate training, a lease-scale mooring screening campaign is performed to construct the mudline load fields used by Stage A.
A hexagonal grid of probe FOWTs is distributed across the cropped Celtic Sea lease domain, and each floater is evaluated through directional watch-circle sweeps using
the morie_mooring workflow. The resulting anchor-level mudline loads (Tm, θm) are stored as spatial load planes and later queried internally by the surrogate during inference.
The selected configuration uses:
- Hex spacing: 800 m
- Inner buffer: 300 m
- 52 probe FOWTs
- 156 anchors (143 inside cropped-domain)
This configuration provides a balance between:
- Spatial coverage
- Load-field interpolation quality
- Computational cost
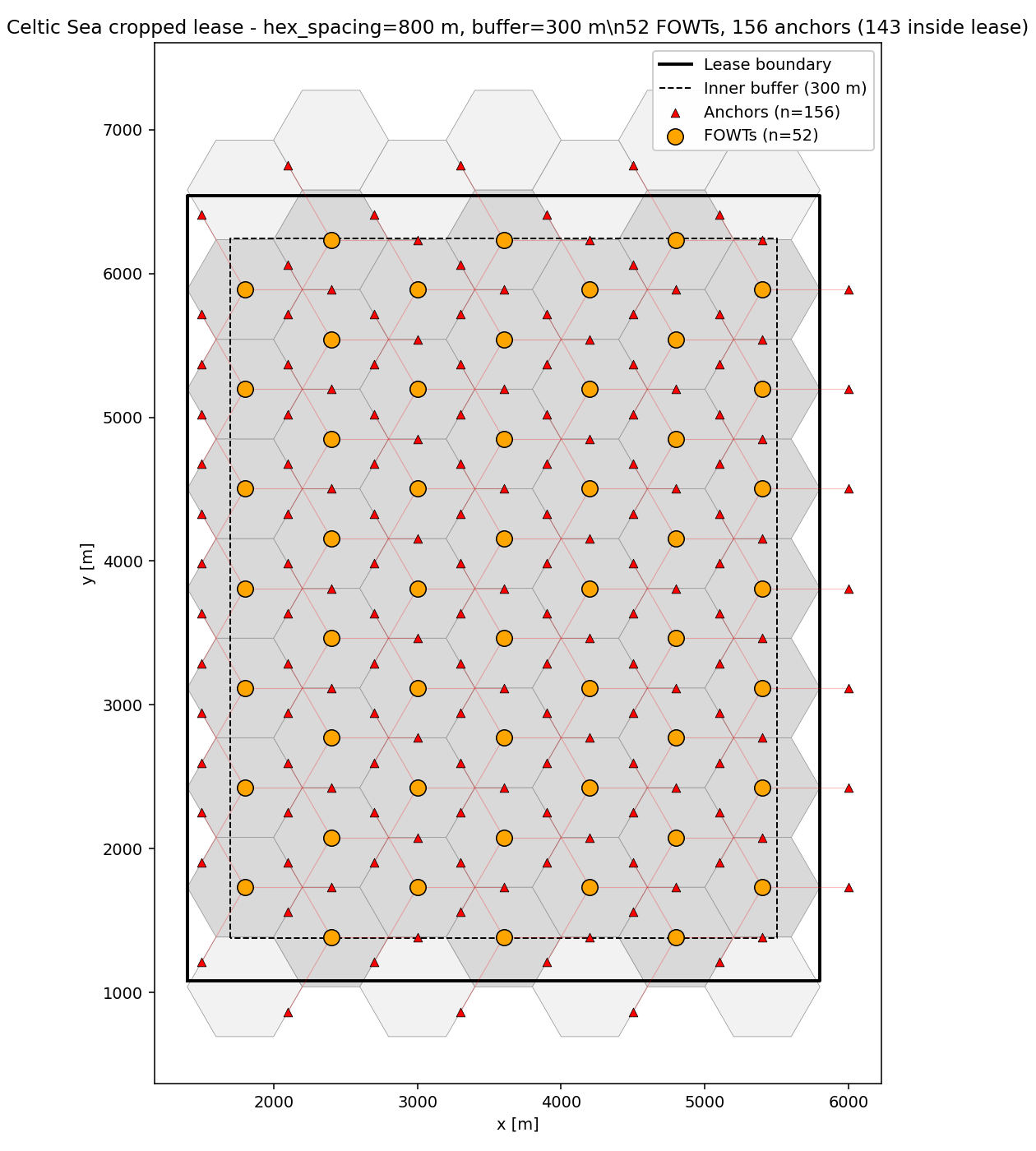
Figure 2 – Hexagonal probe-FOWT layout used to generate lease-scale mudline load fields for Stage A surrogate training.
Methodology
- Spatial sampling across lease domain
- Soil reconstruction via interpolation
- Load extraction from mooring fields
- Capacity solving via iterative physics model
Each sample produces:
- Input features (soil + loads)
- Target outputs (D, L, Mass at UC ≈ 1)
The surrogate replaces the iterative capacity loop with a learned mapping from spatial inputs to anchor design outputs.
Engineering Significance
This ensures:
- Physical consistency of training data
- Full control over design space
- Reproducibility of results
Model Performance
The trained model demonstrates strong predictive capability within the cropped local engineering domain established in morie_soil.
Key Results
- Accurate prediction of D and L within the cropped local domain
- Robust load transformation in Stage A
- No physically reliable prediction capability outside the trained design domain
Engineering Interpretation
- Geometry predictions remain stable
- Soil-driven variability dominates results
- Extrapolation limits reflect physical domain boundaries
Multiple (D, L) combinations can produce mechanically equivalent solutions along the UC ≈ 1 manifold while preserving similar overall anchor mass.
This explains why global mass predictions remain more robust than individual geometric variables such as diameter. The model captures underlying engineering behavior, not only statistical correlations.
Atlas Visualization & Lease-Scale Prediction
The surrogate enables rapid evaluation and visualization across the conditioned lease-scale domain.
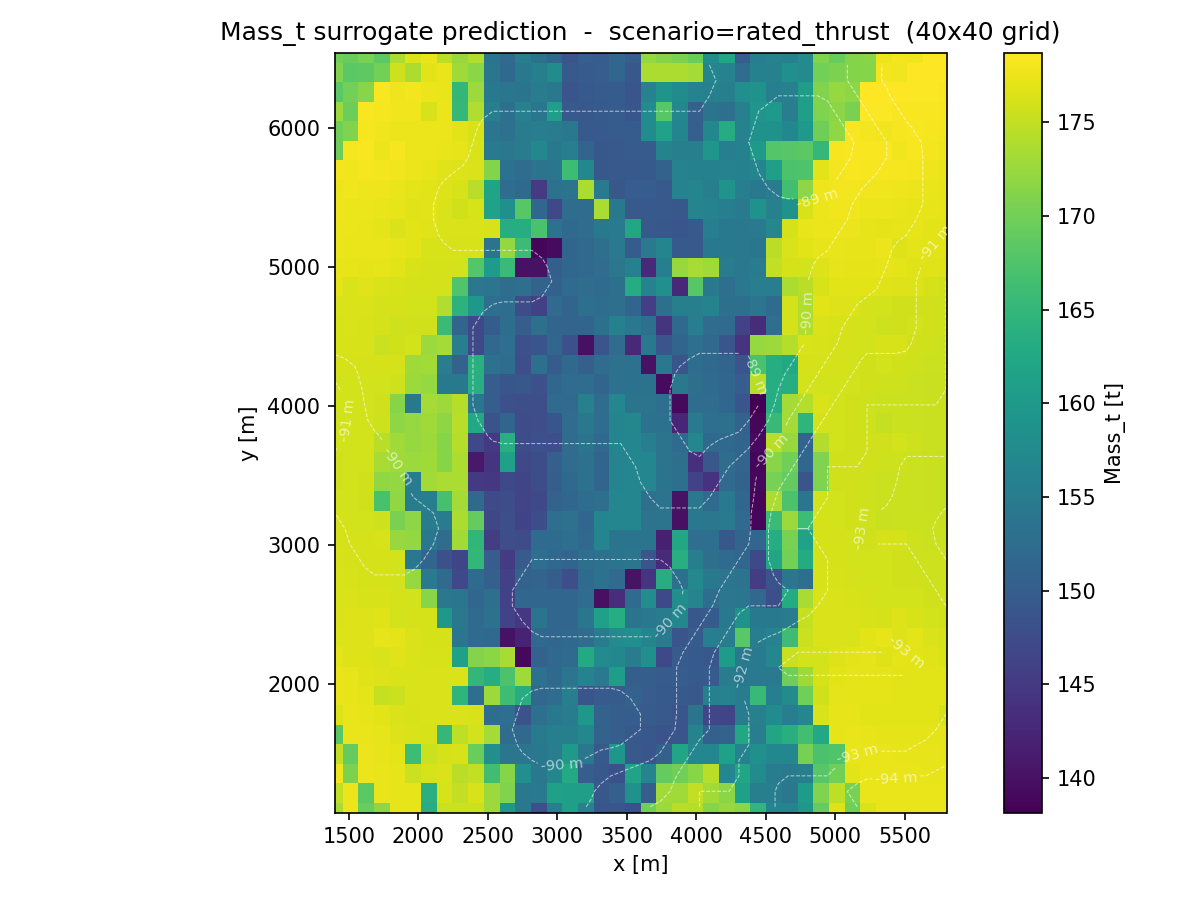
Figure 3 – Lease-scale prediction of anchor mass using the surrogate model.
Example Output
- 40 × 40 grid evaluation (1,600 points)
- Mass range variation: ~25 t (~17% of mean)
This level of variation has direct implications for:
- Anchor standardization strategies
- Installation planning and logistics
- Cost distribution across the lease
It highlights that even within a seemingly uniform sand domain, subsurface variability alone can drive significant differences in anchor sizing.
Atlas Query Example
Atlas is not limited to lease-scale prediction maps. Individual locations can also be queried to expose the full engineering traceability behind a predicted anchor design.
For a selected anchor location, morie_atlas retrieves the local soil conditions, mudline loads from morie_mooring, inferred padeye loads from Stage A and the resulting
suction-pile dimensions predicted by Stage B.
This creates a transparent workflow where the final design recommendation can always be traced back to the underlying geotechnical and loading assumptions.
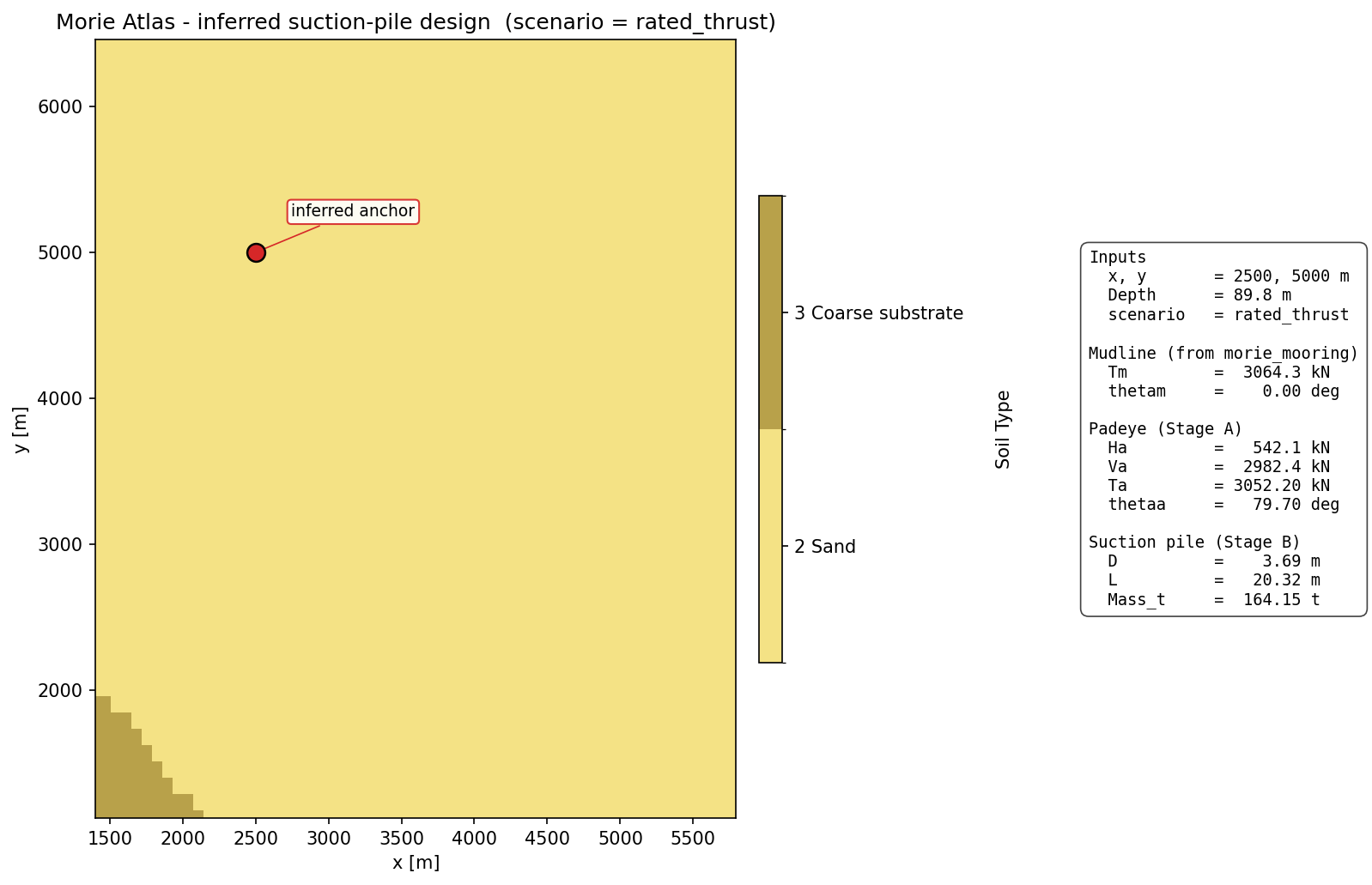
Figure 4 – Atlas query example for a single anchor location. The interface exposes the complete engineering chain from local soil conditions and mudline loads through Stage A load transfer and Stage B anchor sizing predictions.
Spatial Drivers of Anchor Mass
Within the constrained Celtic Sea cropped-domain configuration used in this study, spatial variability in suction-pile mass is dominated by the reconstructed subsurface geometry, particularly the Z1 and Z2 layer boundaries.
In the current sand-only domain:
- Soil layer geometry accounts for ~95% of the spatial variability in predicted pile mass
- Mudline load variation contributes secondarily
- Raw spatial coordinates become largely irrelevant once the upstream soil and load fields are resolved
This behavior is specific to the present site-conditioned surrogate and should not be interpreted as a universal result for offshore anchor design. The result instead highlights that, within the studied domain, variations in bearing stratigraphy exert a stronger influence on anchor sizing than the relatively limited variation in load magnitude.
Engineering Implication
This result confirms that, within the studied domain:
- Anchor design is primarily controlled by subsurface structure, not by load magnitude
- Layout position only matters through its interaction with soil variability
This shifts the design focus from:
Load-driven sizing
to
Soil-driven optimization
This has direct consequences for early-stage design strategies, particularly in:
- Anchor clustering
- Layout standardization
- Cost-driven decision making
Engineering Interpretation
- Soil stratigraphy controls design
- Load variation plays a secondary role
- Spatial location is only relevant through underlying fields
This validates core geotechnical principles at scale.
Outputs Generated
- Training dataset
- Trained machine learning models
- Validation metrics and plots
- Lease-scale prediction grids
- Anchor design outputs (D, L, Mass)
These outputs are directly usable in downstream decision frameworks.
Engineering Applications
The outputs support:
- Lease-scale anchor sizing
- Sensitivity analysis across scenarios
- Rapid evaluation of layout alternatives
- Integration into optimization workflows
- Cost and feasibility mapping
This enables:
Anchor Design → Predictive Mapping → System-Level Decisions
Relationship to Other Morie Study Cases
This study is the predictive extension of the anchor workflow.
Receives from
- morie_site → spatial context
- morie_layout → system geometry
- morie_soil → subsurface characterization
- morie_mooring → load fields
- morie_anchor → physics-based design logic
Feeds into
- Engineering decision support
- Lease-scale visualization
- Design standardization studies
- Installation planning workflows
It provides the transition from physics-based design to scalable prediction.
Why It Matters Commercially?
- Enables lease-scale anchor assessment in real time
- Reduces computational cost of early-stage design
- Supports rapid scenario evaluation
- Improves integration across engineering disciplines
- Bridges physics-based models with data-driven workflows
This is where:
- Engineering becomes scalable
- Design becomes interactive
- Decisions become data-driven
Aspects to Improve
- Extension to multi-soil environments (clay, rock)
- Inclusion of installation and cyclic effects
- Uncertainty quantification
- Expansion of training domain
- Integration with optimization frameworks
These extensions would move the workflow toward fully predictive offshore design systems.
Design Philosophy
This study reflects the Morie Analytics approach:
- Physics-informed: labels originate from the validated
morie_anchorcapacity formulations. - Mechanism-preserving: the two-stage cascade mirrors the underlying engineering workflow.
- Reproducible: all datasets and models are generated from deterministic configuration-driven pipelines.
- Scalable: millisecond-level prediction enables lease-scale evaluation and interactive engineering workflows.
- Site-conditioned: the surrogate is explicitly tied to reconstructed soil and load fields from the Celtic Sea domain.